UNBREAKABLE DEMONSTRATION
Building the Most Powerful and Rugged Actuators
UNBREAKABLE DEMONSTRATION
Building the Most Powerful and Rugged Actuators
WATCH VIDEO
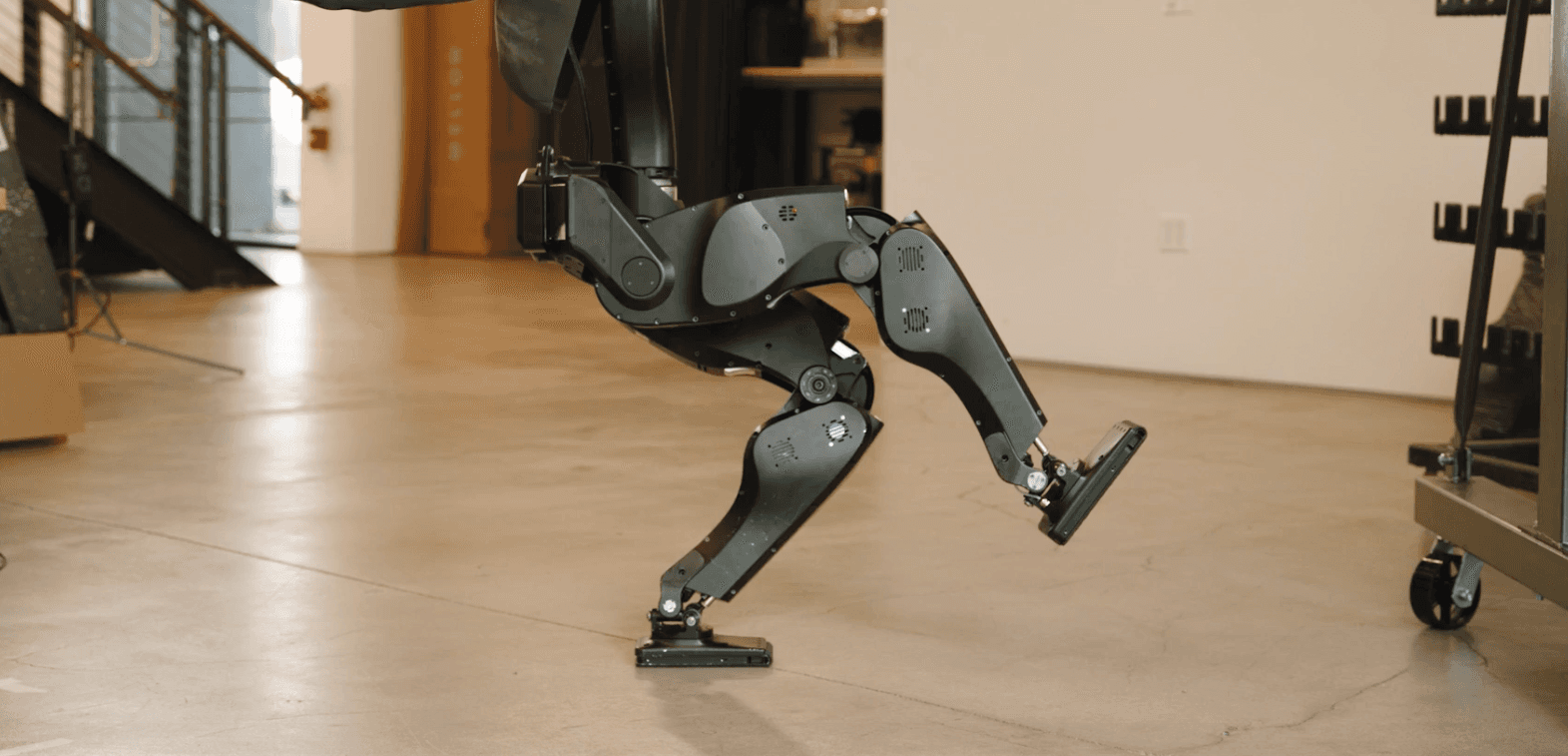
OUR ACTUATORS
Efficient torque control without sensors. Consistent power for high-force tasks.
OUR ACTUATORS
Efficient torque control without sensors. Consistent power for high-force tasks.
RESPONSE TIME
<10 MS
RESPONSE TIME
<10 MS
SPEED
9 RAD/S @ 48V
12 RAD/S @ 72V
SPEED
9 RAD/S @ 48V
12 RAD/S @ 72V
VOLTAGE
48V / 72V
VOLTAGE
48V / 72V
WRIST TORQUE
20 Nm
WRIST TORQUE
20 Nm
LEGS TORQUE
>160 Nm
LEGS TORQUE
>160 Nm
SHOULDER TORQUE
119 Nm
SHOULDER TORQUE
119 Nm
OUR GEARS
Precision-machined cycloidal design. Engineered for performance and longevity.
OUR GEARS
Precision-machined cycloidal design. Engineered for performance and longevity.
KEY benefits
Torque Density
Delivers high torque in a compact, lightweight frame.
Torque Density
Delivers high torque in a compact, lightweight frame.
Torque Density
Delivers high torque in a compact, lightweight frame.
Low Backlash
Cycloidal drive ensures stable, backlash-free motion.
Low Backlash
Cycloidal drive ensures stable, backlash-free motion.
Low Backlash
Cycloidal drive ensures stable, backlash-free motion.
Silent Operation
Minimal vibration and noise during full-power motion.
Silent Operation
Minimal vibration and noise during full-power motion.
Silent Operation
Minimal vibration and noise during full-power motion.
No Sensors Required
Achieves accuracy and force without external sensors.
No Sensors Required
Achieves accuracy and force without external sensors.
No Sensors Required
Achieves accuracy and force without external sensors.
Long-Term Reliability
Built to endure years of heavy-duty industrial use.
Long-Term Reliability
Built to endure years of heavy-duty industrial use.
Long-Term Reliability
Built to endure years of heavy-duty industrial use.
Modular Design
Easily integrates into diverse robotic architectures.
Modular Design
Easily integrates into diverse robotic architectures.
Modular Design
Easily integrates into diverse robotic architectures.
SUBSCRIBE FOR UPDATES
SUBSCRIBE FOR UPDATES
© Foundation Future Industries, Inc. 2025


© Foundation Future Industries, Inc. 2025
© Foundation Future Industries, Inc. 2025